
Java并发编程原理与实战十九:AQS 剖析
一、引言
在JDK1.5之前,一般是靠synchronized关键字来实现线程对共享变量的互斥访问。synchronized是在字节码上加指令,依赖于底层操作系统的Mutex Lock实现。
而从JDK1.5以后java界的一位大神—— Doug Lea 开发了AbstractQueuedSynchronizer(AQS)组件,使用原生java代码实现了synchronized语义。换句话说,Doug Lea没有使用更“高级”的机器指令,也不依靠JDK编译时的特殊处理,仅用一个普普通通的类就完成了代码块的并发访问控制,比那些费力不讨好的实现不知高到哪里去了。
java.util.concurrent包有多重要无需多言,一言以蔽之,是Doug Lea大爷对天下所有Java程序员的怜悯。
AQS定义了一套多线程访问共享资源的同步器框架,是整个java.util.concurrent包的基石,Lock、ReadWriteLock、CountDowndLatch、CyclicBarrier、Semaphore、ThreadPoolExecutor等都是在AQS的基础上实现的。
二、原理
2.1实现原理
并发控制的核心是锁的获取与释放,锁的实现方式有很多种,AQS采用的是一种改进的CLH锁。
2.2 CLH锁
CLH(Craig, Landin, andHagersten locks)是一钟自旋锁,能确保无饥饿性,提供先来先服务的公平性。
何谓自旋锁?它是为实现保护共享资源而提出一种锁机制。其实,自旋锁与互斥锁比较类似,它们都是为了解决对某项资源的互斥使用。无论是互斥锁,还是自旋锁,在任何时刻,最多只能有一个保持者,也就是说,在任何时刻最多只能有一个执行单元获得锁。但是两者在调度机制上略有不同。对于互斥锁,如果资源已经被占用,资源申请者只能进入睡眠状态。但是自旋锁不会引起调用者睡眠,如果自旋锁已经被别的执行单元保持,调用者就一直循环在那里看是否该自旋锁的保持者已经释放了锁,“自旋”一词就是因此而得名
CLH锁是一种基于链表的可扩展、高性能、公平的自旋锁,申请线程只在本地变量上自旋,它不断轮询前驱的状态,如果发现前驱释放了锁就结束自旋。
CLH队列中的结点QNode中含有一个locked字段,该字段若为true表示该线程需要获取锁,且不释放锁,为false表示线程释放了锁。结点之间是通过隐形的链表相连,之所以叫隐形的链表是因为这些结点之间没有明显的next指针,而是通过myPred所指向的结点的变化情况来影响myNode的行为。CLHLock上还有一个尾指针,始终指向队列的最后一个结点。
当一个线程需要获取锁时,会创建一个新的QNode,将其中的locked设置为true表示需要获取锁,然后使自己成为队列的尾部,同时获取一个指向其前趋的引用myPred,然后该线程就在前趋结点的locked字段上旋转,直到前趋结点释放锁。当一个线程需要释放锁时,将当前结点的locked域设置为false,同时回收前趋结点。如上图所示,线程A需要获取锁,其myNode域为true,些时tail指向线程A的结点,然后线程B也加入到线程A后面,tail指向线程B的结点。然后线程A和B都在它的myPred域上旋转,一旦它的myPred结点的locked字段变为false,它就可以获取锁。
2.3 AQS数据模型
AQS维护了一个volatile int state(代表共享资源)和一个FIFO线程等待队列(多线程争用资源被阻塞时会进入此队列)。

AQS的内部队列是CLH同步锁的一种变形。其主要从两方面进行了改造,节点的结构与节点等待机制:
l 在结构上引入了头结点和尾节点,分别指向队列的头和尾,尝试获取锁、入队列、释放锁等实现都与头尾节点相关,
l 为了可以处理timeout和cancel操作,每个node维护一个指向前驱的指针。如果一个node的前驱被cancel,这个node可以前向移动使用前驱的状态字段
l 在每个node里面使用一个状态字段来控制阻塞/唤醒,而不是自旋
l head结点使用的是傀儡结点
FIFO队列中的节点有AQS的静态内部类Node定义:
static final class Node { // 共享模式 static final Node SHARED = new Node(); // 独占模式 static final Node EXCLUSIVE = null; static final int CANCELLED = 1; static final int SIGNAL = -1; static final int CONDITION = -2; static final int PROPAGATE = -3; /** * CANCELLED,值为1,表示当前的线程被取消 * SIGNAL,值为-1,表示当前节点的后继节点包含的线程需要运行,也就是unpark; * CONDITION,值为-2,表示当前节点在等待condition,也就是在condition队列中; * PROPAGATE,值为-3,表示当前场景下后续的acquireShared能够得以执行; * 值为0,表示当前节点在sync队列中,等待着获取锁。 */ volatile int waitStatus; // 前驱结点 volatile Node prev; // 后继结点 volatile Node next; // 与该结点绑定的线程 volatile Thread thread; // 存储condition队列中的后继节点 Node nextWaiter; // 是否为共享模式 final boolean isShared() { return nextWaiter == SHARED; } // 获取前驱结点 final Node predecessor() throwsNullPointerException { Node p = prev; if (p == null) throw new NullPointerException(); else return p; } Node() { // Used to establish initial heador SHARED marker } Node(Thread thread, Node mode) { // Used byaddWaiter this.nextWaiter = mode; this.thread = thread; } Node(Thread thread, int waitStatus) { //Used by Condition this.waitStatus = waitStatus; this.thread = thread; } }
Node类中有两个常量SHARE和EXCLUSIVE,顾名思义这两个常量用于表示这个结点支持共享模式还是独占模式,共享模式指的是允许多个线程获取同一个锁而且可能获取成功,独占模式指的是一个锁如果被一个线程持有,其他线程必须等待。多个线程读取一个文件可以采用共享模式,而当有一个线程在写文件时不会允许另一个线程写这个文件,这就是独占模式的应用场景。
2.4 CAS操作
AQS有三个重要的变量:
// 队头结点 private transient volatile Node head; // 队尾结点 private transient volatile Node tail; // 代表共享资源 private volatile int state; protected final int getState() { return state; } protected final void setState(int newState){ state = newState; } protected final boolean compareAndSetState(int expect, int update) { return unsafe.compareAndSwapInt(this,stateOffset, expect, update); }
compareAndSetState方法是以乐观锁的方式更新共享资源。
独占锁是一种悲观锁,synchronized就是一种独占锁,会导致其它所有需要锁的线程挂起,等待持有锁的线程释放锁。而另一个更加有效的锁就是乐观锁。所谓乐观锁就是,每次不加锁而是假设没有冲突而去完成某项操作,如果因为冲突失败就重试,直到成功为止。乐观锁用到的机制就是CAS,即Compare And Swap。
CAS 指的是现代 CPU 广泛支持的一种对内存中的共享数据进行操作的一种特殊指令。这个指令会对内存中的共享数据做原子的读写操作。简单介绍一下这个指令的操作过程:
首先,CPU 会将内存中将要被更改的数据与期望的值做比较。然后,当这两个值相等时,CPU 才会将内存中的数值替换为新的值。否则便不做操作。最后,CPU 会将旧的数值返回。
这一系列的操作是原子的。它们虽然看似复杂,但却是 Java 5 并发机制优于原有锁机制的根本。简单来说,CAS 的含义是“我认为原有的值应该是什么,如果是,则将原有的值更新为新值,否则不做修改,并告诉我原来的值是多少”。
CAS通过调用JNI(Java Native Interface)调用实现的。JNI允许java调用其他语言,而CAS就是借助C语言来调用CPU底层指令实现的。Unsafe是CAS的核心类,它提供了硬件级别的原子操作
Doug Lea大神在java同步器中大量使用了CAS技术,鬼斧神工的实现了多线程执行的安全性。CAS不仅在AQS的实现中随处可见,也是整个java.util.concurrent包的基石。
可以发现,head、tail、state三个变量都是volatile的。
volatile是轻量级的synchronized,它在多处理器开发中保证了共享变量的“可见性”。可见性的意思是当一个线程修改一个共享变量时,另外一个线程能读到这个修改的值。如果一个字段被声明成volatile,Java线程内存模型确保所有线程看到这个变量的值是一致的。
volatile变量也存在一些局限:不能用于构建原子的复合操作,因此当一个变量依赖旧值时就不能使用volatile变量。而CAS呢,恰恰可以提供对共享变量的原子的读写操作。
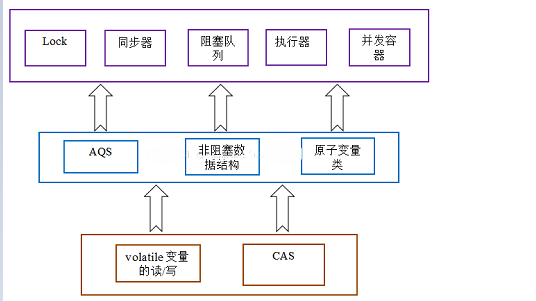
volatile保证共享变量的可见性,CAS保证更新操作的原子性,简直是绝配!把这些特性整合在一起,就形成了整个concurrent包得以实现的基石。如果仔细分析concurrent包的源代码实现,会发现一个通用化的实现模式:
1. 首先,声明共享变量为volatile;
2. 然后,使用CAS的原子条件更新来实现线程之间的同步;
3. 同时,配合以volatile的读/写和CAS所具有的volatile读和写的内存语义来实现线程之间的通信。
AQS,非阻塞数据结构和原子变量类(java.util.concurrent.atomic包中的类),这些concurrent包中的基础类都是使用这种模式来实现的,而concurrent包中的高层类又是依赖于这些基础类来实现的。从整体来看,concurrent包的实现示意图如下:
三、源码解读 (java特种兵)
AQS的全称为(AbstractQueuedSynchronizer),这个类也是在java.util.concurrent.locks下面。这个类似乎很不容易看懂,因为它仅仅是提供了一系列公共的方法,让子类来调用。那么要理解意思,就得从子类下手,反过来看才容易看懂。如下图所示:
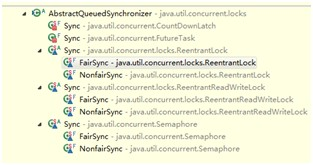
这么多类,我们看那一个?刚刚提到过锁(Lock),我们就从锁开始吧。这里就先以ReentrantLock排它锁为例开始展开讲解如何利用AQS的,然后再简单介绍读写锁的要点(读写锁本身的实现十分复杂,要完全说清楚需要大量的篇幅来说明)。
首先来看看ReentrantLock的构造方法,它的构造方法有两个,如下图所示:
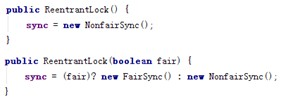
很显然,对象中有一个属性叫sync,有两种不同的实现类,默认是“NonfairSync”来实现,而另一个“FairSync”它们都是排它锁的内部类,不论用那一个都能实现排它锁,只是内部可能有点原理上的区别。先以“NonfairSync”类为例,它的lock()方法是如何实现的呢?
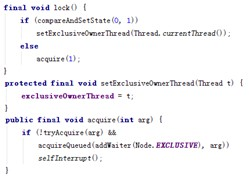
lock()方法先通过CAS尝试将状态从0修改为1。若直接修改成功,前提条件自然是锁的状态为0,则直接将线程的OWNER修改为当前线程,这是一种理想情况,如果并发粒度设置适当也是一种乐观情况。
若上一个动作未成功,则会间接调用了acquire(1)来继续操作,这个acquire(int)方法就是在AbstractQueuedSynchronizer当中了。这个方法表面上看起来简单,但真实情况比较难以看懂,因为第一次看这段代码可能不知道它要做什么!不急,一步一步来分解。
首先看tryAcquire(arg)这里的调用(当然传入的参数是1),在默认的“NonfairSync”实现类中,会这样来实现:
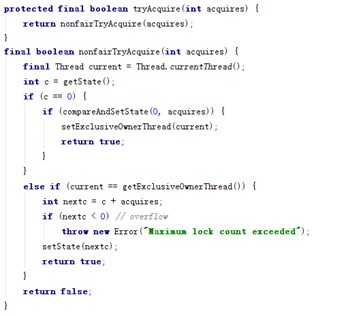
○ 首先获取这个锁的状态,如果状态为0,则尝试设置状态为传入的参数(这里就是1),若设置成功就代表自己获取到了锁,返回true了。状态为0设置1的动作在外部就有做过一次,内部再一次做只是提升概率,而且这样的操作相对锁来讲不占开销。
○ 如果状态不是0,则判定当前线程是否为排它锁的Owner,如果是Owner则尝试将状态增加acquires(也就是增加1),如果这个状态值越界,则会抛出异常提示,若没有越界,将状态设置进去后返回true(实现了类似于偏向的功能,可重入,但是无需进一步征用)。
○ 如果状态不是0,且自身不是owner,则返回false。
对tryAcquire()的调用判定中是通过if(!tryAcquire())作为第1个条件的,如果返回true,则判定就不会成立了,自然后面的acquireQueued动作就不会再执行了,如果发生这样的情况是最理想的。
无论多么乐观,征用是必然存在的,如果征用存在则owner自然不会是自己,tryAcquire()方法会返回false,接着就会再调用方法:acquireQueued(addWaiter(Node.EXCLUSIVE), arg)做相关的操作。
这个方法的调用的代码更不好懂,需要从里往外看,这里的Node.EXCLUSIVE是节点的类型,看名称应该清楚是排它类型的意思。接着调用addWaiter()来增加一个排它锁类型的节点,这个addWaiter()的代码是这样写的:
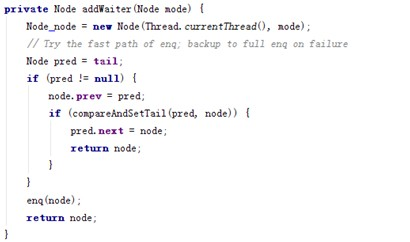
这里创建了一个Node的对象,将当前线程和传入的Node.EXCLUSIVE传入,也就是说Node节点理论上包含了这两项信息。代码中的tail是AQS的一个属性,刚开始的时候肯定是为null,也就是不会进入第一层if判定的区域,而直接会进入enq(node)的代码,那么直接来看看enq(node)的代码。
看到了tail就应该猜到了AQS是链表吧,没错,而且它还应该有一个head引用来指向链表的头节点,AQS在初始化的时候head、tail都是null,在运行时来回移动。此时,我们最少至少知道AQS是一个基于状态(state)的链表管理方式。
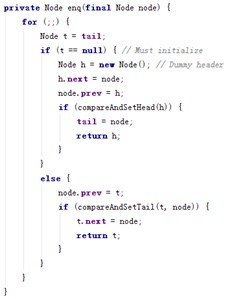
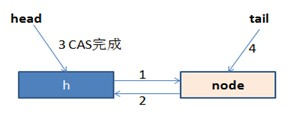
首先这个是一个死循环,而且本身没有锁,因此可以有多个线程进来,假如某个线程进入方法,此时head、tail都是null,自然会进入if(t == null)所在的代码区域,这部分代码会创建一个Node出来名字叫h,这个Node没有像开始那样给予类型和线程,很明显是一个空的Node对象,而传入的Node对象首先被它的next引用所指向,此时传入的node和某一个线程创建的h对象如下图所示。

刚才我们很理想的认为只有一个线程会出现这种情况,如果有多个线程并发进入这个if判定区域,可能就会同时存在多个这样的数据结构,在各自形成数据结构后,多个线程都会去做compareAndSetHead(h)的动作,也就是尝试将这个临时h节点设置为head,显然并发时只有一个线程会成功,因此成功的那个线程会执行tail = node的操作,整个AQS的链表就成为:
有一个线程会成功修改head和tail的值,其它的线程会继续循环,再次循环就不会进入if (t == null)的逻辑了,而会进入else语句的逻辑中。
在else语句所在的逻辑中,第一步是node.prev = t,这个t就是tail的临时值,也就是首先让尝试写入的node节点的prev指针指向原来的结束节点,然后尝试通过CAS替换掉AQS中的tail的内容为当前线程的Node,无论有多少个线程并发到这里,依然只会有一个能成功,成功者执行t.next = node,也就是让原先的tail节点的next引用指向现在的node,现在的node已经成为了最新的结束节点,不成功者则会继续循环。
简单使用图解的方式来说明,3个步骤如下所示,如下图所示:
插入多个节点的时候,就以此类推了哦,总之节点都是在链表尾部写入的,而且是线程安全的。
知道了AQS大致的写入是一种双向链表的插入操作,但插入链表节点对锁有何用途呢,我们还得退回到前面的代码中addWaiter方法最终返回了要写入的node节点, 再回退到图5-17中所在的代码中需要将这个返回的node节点作为acquireQueued方法入口参数,并传入另一个参数(依然是1),看看它里面到底做了些什么?请看下图:
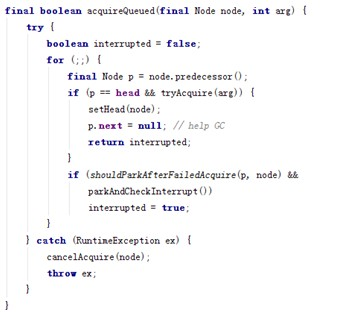
这里也是一个死循环,除非进入if(p == head && tryAcquire(arg))这个判定条件,而p为node.predcessor()得到,这个方法返回node节点的前一个节点,也就是说只有当前一个节点是head的时候,进一步尝试通过tryAcquire(arg)来征用才有机会成功。tryAcquire(arg)这个方法我们前面介绍过,成立的条件为:锁的状态为0,且通过CAS尝试设置状态成功或线程的持有者本身是当前线程才会返回true,我们现在来详细拆分这部分代码。
○ 如果这个条件成功后,发生的几个动作包含:
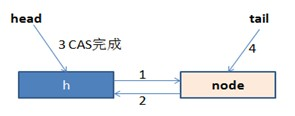
(1) 首先调用setHead(Node)的操作,这个操作内部会将传入的node节点作为AQS的head所指向的节点。线程属性设置为空(因为现在已经获取到锁,不再需要记录下这个节点所对应的线程了),再将这个节点的perv引用赋值为null。
(2) 进一步将的前一个节点的next引用赋值为null。
在进行了这样的修改后,队列的结构就变成了以下这种情况了,通过这样的方式,就可以让执行完的节点释放掉内存区域,而不是无限制增长队列,也就真正形成FIFO了:

○ 如果这个判定条件失败
会首先判定:“shouldParkAfterFailedAcquire(p , node)”,这个方法内部会判定前一个节点的状态是否为:“Node.SIGNAL”,若是则返回true,若不是都会返回false,不过会再做一些操作:判定节点的状态是否大于0,若大于0则认为被“CANCELLED”掉了(我们没有说明几个状态的值,不过大于0的只可能被CANCELLED的状态),因此会从前一个节点开始逐步循环找到一个没有被“CANCELLED”节点,然后与这个节点的next、prev的引用相互指向;如果前一个节点的状态不是大于0的,则通过CAS尝试将状态修改为“Node.SIGNAL”,自然的如果下一轮循环的时候会返回值应该会返回true。
如果这个方法返回了true,则会执行:“parkAndCheckInterrupt()”方法,它是通过LockSupport.park(this)将当前线程挂起到WATING状态,它需要等待一个中断、unpark方法来唤醒它,通过这样一种FIFO的机制的等待,来实现了Lock的操作。
相应的,可以自己看看FairSync实现类的lock方法,其实区别不大,有些细节上的区别可能会决定某些特定场景的需求,你也可以自己按照这样的思路去实现一个自定义的锁。
接下来简单看看unlock()解除锁的方式,如果获取到了锁不释放,那自然就成了死锁,所以必须要释放,来看看它内部是如何释放的。同样从排它锁(ReentrantLock)中的unlock()方法开始,请先看下面的代码截图:
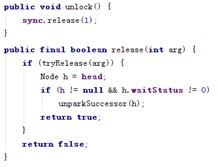
通过tryRelease(int)方法进行了某种判定,若它成立则会将head传入到unparkSuccessor(Node)方法中并返回true,否则返回false。首先来看看tryRelease(int)方法,如下图所示:
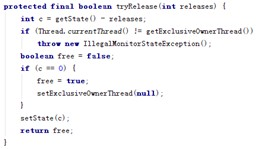
这个动作可以认为就是一个设置锁状态的操作,而且是将状态减掉传入的参数值(参数是1),如果结果状态为0,就将排它锁的Owner设置为null,以使得其它的线程有机会进行执行。
在排它锁中,加锁的时候状态会增加1(当然可以自己修改这个值),在解锁的时候减掉1,同一个锁,在可以重入后,可能会被叠加为2、3、4这些值,只有unlock()的次数与lock()的次数对应才会将Owner线程设置为空,而且也只有这种情况下才会返回true。
这一点大家写代码要注意了哦,如果是在循环体中lock()或故意使用两次以上的lock(),而最终只有一次unlock(),最终可能无法释放锁。在本书的src/chapter05/locks/目录下有相应的代码,大家可以自行测试的哦。
在方法unparkSuccessor(Node)中,就意味着真正要释放锁了,它传入的是head节点(head节点是已经执行完的节点,在后面阐述这个方法的body的时候都叫head节点),内部首先会发生的动作是获取head节点的next节点,如果获取到的节点不为空,则直接通过:“LockSupport.unpark()”方法来释放对应的被挂起的线程,这样一来将会有一个节点唤醒后继续进入图 5-24中的循环进一步尝试tryAcquire()方法来获取锁,但是也未必能完全获取到哦,因为此时也可能有一些外部的请求正好与之征用,而且还奇迹般的成功了,那这个线程的运气就有点悲剧了,不过通常乐观认为不会每一次都那么悲剧。
再看看共享锁,从前面的排它锁可以看得出来是用一个状态来标志锁的,而共享锁也不例外,但是Java不希望去定义两个状态,所以它与排它锁的第一个区别就是在锁的状态上,它用int来标志锁的状态,int有4个字节,它用高16位标志读锁(共享锁),低16位标志写锁(排它锁),高16位每次增加1相当于增加65536(通过1 << 16得到),自然的在这种读写锁中,读锁和写锁的个数都不能超过65535个(条件是每次增加1的,如果递增是跳跃的将会更少)。在计算读锁数量的时候将状态左移16位,而计算排它锁会与65535“按位求与”操作,如下图所示。
写锁的功能与“ReentrantLock”基本一致,区域在于它会在tryAcquire操作的时候,判定状态的时候会更加复杂一些(因此有些时候它的性能未必好)。
读锁也会写入队列,Node的类型被改为:“Node.SHARED”这种类型,lock()时候调用的是AQS的acquireShared(int)方法,进一步调用tryAcquireShared()操作里面只需要检测是否有排它锁,如果没有则可以尝试通过CAS修改锁的状态,如果没有修改成功,则会自旋这个动作(可能会有很多线程在这自旋开销CPU)。如果这个自旋的过程中检测到排它锁竞争成功,那么tryAcquireShared()会返回-1,从而会走如排它锁的Node类似的流程,可能也会被park住,等待排它锁相应的线程最终调用unpark()动作来唤醒。
这就是Java提供的这种读写锁,不过这并不是共享锁的诠释,在共享锁里面也有多种机制 ,或许这种读写锁只是其中一种而已。在这种锁下面,读和写的操作本身是互斥的,但是读可以多个一起发生。这样的锁理论上是非常适合应用在“读多写少”的环境下(当然我们所讲的读多写少是读的比例远远大于写,而不是多一点点),理论上讲这样锁征用的粒度会大大降低,同时系统的瓶颈会减少,效率得到总体提升。
在本节中我们除了学习到AQS的内在,还应看到Java通过一个AQS队列解决了许多问题,这个是Java层面的队列模型,其实我们也可以利用许多队列模型来解决自己的问题,甚至于可以改写模型模型来满足自己的需求.
关于Lock及AQS的一些补充:
1、 Lock的操作不仅仅局限于lock()/unlock(),因为这样线程可能进入WAITING状态,这个时候如果没有unpark()就没法唤醒它,可能会一直“睡”下去,可以尝试用tryLock()、tryLock(long , TimeUnit)来做一些尝试加锁或超时来满足某些特定场景的需要。例如有些时候发现尝试加锁无法加上,先释放已经成功对其它对象添加的锁,过一小会再来尝试,这样在某些场合下可以避免“死锁”哦。
2、 lockInterruptibly() 它允许抛出InterruptException异常,也就是当外部发起了中断操作,程序内部有可能会抛出这种异常,但是并不是绝对会抛出异常的,大家仔细看看代码便清楚了。
3、 newCondition()操作,是返回一个Condition的对象,Condition只是一个接口,它要求实现await()、awaitUninterruptibly()、awaitNanos(long)、await(long , TimeUnit)、awaitUntil(Date)、signal()、signalAll()方法,AbstractQueuedSynchronizer中有一个内部类叫做ConditionObject实现了这个接口,它也是一个类似于队列的实现,具体可以参考源码。大多数情况下可以直接使用,当然觉得自己比较牛逼的话也可以参考源码自己来实现。
4、 在AQS的Node中有每个Node自己的状态(waitStatus),我们这里归纳一下,分别包含:
SIGNAL 从前面的代码状态转换可以看得出是前面有线程在运行,需要前面线程结束后,调用unpark()方法才能激活自己,值为:-1
CANCELLED 当AQS发起取消或fullyRelease()时,会是这个状态。值为1,也是几个状态中唯一一个大于0的状态,所以前面判定状态大于0就基本等价于是CANCELLED的意思。
CONDITION 线程基于Condition对象发生了等待,进入了相应的队列,自然也需要Condition对象来激活,值为-2。
PROPAGATE 读写锁中,当读锁最开始没有获取到操作权限,得到后会发起一个doReleaseShared()动作,内部也是一个循环,当判定后续的节点状态为0时,尝试通过CAS自旋方式将状态修改为这个状态,表示节点可以运行。
状态0 初始化状态,也代表正在尝试去获取临界资源的线程所对应的Node的状态。
代码上的理解注释,可以参考:http://ifeve.com/juc-aqs-reentrantlock/
四 、AQS和CAS 对比
CAS(Compare And Swap)
什么是CAS
CAS(Compare And Swap),即比较并交换。是解决多线程并行情况下使用锁造成性能损耗的一种机制,CAS操作包含三个操作数——内存位置(V)、预期原值(A)和新值(B)。如果内存位置的值与预期原值相匹配,那么处理器会自动将该位置值更新为新值。否则,处理器不做任何操作。无论哪种情况,它都会在CAS指令之前返回该位置的值。CAS有效地说明了“我认为位置V应该包含值A;如果包含该值,则将B放到这个位置;否则,不要更改该位置,只告诉我这个位置现在的值即可。
在JAVA中,sun.misc.Unsafe 类提供了硬件级别的原子操作来实现这个CAS。 java.util.concurrent 包下的大量类都使用了这个 Unsafe.java 类的CAS操作。至于 Unsafe.java 的具体实现这里就不讨论了。
CAS典型应用
java.util.concurrent.atomic 包下的类大多是使用CAS操作来实现的(eg. AtomicInteger.java,AtomicBoolean,AtomicLong)。下面以 AtomicInteger.java 的部分实现来大致讲解下这些原子类的实现。
public class AtomicInteger extends Number implements java.io.Serializable { private static final long serialVersionUID = 6214790243416807050L; // setup to use Unsafe.compareAndSwapInt for updates private static final Unsafe unsafe = Unsafe.getUnsafe(); private volatile int value;// 初始int大小 // 省略了部分代码... // 带参数构造函数,可设置初始int大小 public AtomicInteger(int initialValue) { value = initialValue; } // 不带参数构造函数,初始int大小为0 public AtomicInteger() { } // 获取当前值 public final int get() { return value; } // 设置值为 newValue public final void set(int newValue) { value = newValue; } //返回旧值,并设置新值为 newValue public final int getAndSet(int newValue) { /** * 这里使用for循环不断通过CAS操作来设置新值 * CAS实现和加锁实现的关系有点类似乐观锁和悲观锁的关系 * */ for (;;) { int current = get(); if (compareAndSet(current, newValue)) return current; } } // 原子的设置新值为update, expect为期望的当前的值 public final boolean compareAndSet(int expect, int update) { return unsafe.compareAndSwapInt(this, valueOffset, expect, update); } // 获取当前值current,并设置新值为current+1 public final int getAndIncrement() { for (;;) { int current = get(); int next = current + 1; if (compareAndSet(current, next)) return current; } } // 此处省略部分代码,余下的代码大致实现原理都是类似的 }
一般来说在竞争不是特别激烈的时候,使用该包下的原子操作性能比使用 synchronized 关键字的方式高效的多(查看getAndSet(),可知如果资源竞争十分激烈的话,这个for循环可能换持续很久都不能成功跳出。不过这种情况可能需要考虑降低资源竞争才是)。
在较多的场景我们都可能会使用到这些原子类操作。一个典型应用就是计数了,在多线程的情况下需要考虑线程安全问题。通常第一映像可能就是:
public class Counter { private int count; public Counter(){} public int getCount(){ return count; } public void increase(){ count++; } }
上面这个类在多线程环境下会有线程安全问题,要解决这个问题最简单的方式可能就是通过加锁的方式,调整如下:
public class Counter { private int count; public Counter(){} public synchronized int getCount(){ return count; } public synchronized void increase(){ count++; } }
这类似于悲观锁的实现,我需要获取这个资源,那么我就给他加锁,别的线程都无法访问该资源,直到我操作完后释放对该资源的锁。我们知道,悲观锁的效率是不如乐观锁的,上面说了Atomic下的原子类的实现是类似乐观锁的,效率会比使用 synchronized 关系字高,推荐使用这种方式,实现如下:
public class Counter { private AtomicInteger count = new AtomicInteger(); public Counter(){} public int getCount(){ return count.get(); } public void increase(){ count.getAndIncrement(); } }
AQS(AbstractQueuedSynchronizer)
什么是AQS
AQS(AbstractQueuedSynchronizer),AQS是JDK下提供的一套用于实现基于FIFO等待队列的阻塞锁和相关的同步器的一个同步框架。这个抽象类被设计为作为一些可用原子int值来表示状态的同步器的基类。如果你有看过类似 CountDownLatch 类的源码实现,会发现其内部有一个继承了 AbstractQueuedSynchronizer 的内部类 Sync。可见 CountDownLatch 是基于AQS框架来实现的一个同步器.类似的同步器在JUC下还有不少。(eg. Semaphore)
AQS用法
如上所述,AQS管理一个关于状态信息的单一整数,该整数可以表现任何状态。比如, Semaphore 用它来表现剩余的许可数,ReentrantLock 用它来表现拥有它的线程已经请求了多少次锁;FutureTask 用它来表现任务的状态(尚未开始、运行、完成和取消)
To use this class as the basis of a synchronizer, redefine the * following methods, as applicable, by inspecting and/or modifying * the synchronization state using {@link #getState}, {@link * #setState} and/or {@link #compareAndSetState}: * * <ul> * <li> {@link #tryAcquire} * <li> {@link #tryRelease} * <li> {@link #tryAcquireShared} * <li> {@link #tryReleaseShared} * <li> {@link #isHeldExclusively} * </ul>
如JDK的文档中所说,使用AQS来实现一个同步器需要覆盖实现如下几个方法,并且使用getState,setState,compareAndSetState这几个方法来设置获取状态
1. boolean tryAcquire(int arg)
2. boolean tryRelease(int arg)
3. int tryAcquireShared(int arg)
4. boolean tryReleaseShared(int arg)
5. boolean isHeldExclusively()
以上方法不需要全部实现,根据获取的锁的种类可以选择实现不同的方法,支持独占(排他)获取锁的同步器应该实现tryAcquire、 tryRelease、isHeldExclusively而支持共享获取的同步器应该实现tryAcquireShared、tryReleaseShared、isHeldExclusively。下面以 CountDownLatch 举例说明基于AQS实现同步器, CountDownLatch 用同步状态持有当前计数,countDown方法调用 release从而导致计数器递减;当计数器为0时,解除所有线程的等待;await调用acquire,如果计数器为0,acquire 会立即返回,否则阻塞。通常用于某任务需要等待其他任务都完成后才能继续执行的情景。源码如下:
public class CountDownLatch { /** * 基于AQS的内部Sync * 使用AQS的state来表示计数count. */ private static final class Sync extends AbstractQueuedSynchronizer { private static final long serialVersionUID = 4982264981922014374L; Sync(int count) { // 使用AQS的getState()方法设置状态 setState(count); } int getCount() { // 使用AQS的getState()方法获取状态 return getState(); } // 覆盖在共享模式下尝试获取锁 protected int tryAcquireShared(int acquires) { // 这里用状态state是否为0来表示是否成功,为0的时候可以获取到返回1,否则不可以返回-1 return (getState() == 0) ? 1 : -1; } // 覆盖在共享模式下尝试释放锁 protected boolean tryReleaseShared(int releases) { // 在for循环中Decrement count直至成功; // 当状态值即count为0的时候,返回false表示 signal when transition to zero for (;;) { int c = getState(); if (c == 0) return false; int nextc = c-1; if (compareAndSetState(c, nextc)) return nextc == 0; } } } private final Sync sync; // 使用给定计数值构造CountDownLatch public CountDownLatch(int count) { if (count < 0) throw new IllegalArgumentException("count < 0"); this.sync = new Sync(count); } // 让当前线程阻塞直到计数count变为0,或者线程被中断 public void await() throws InterruptedException { sync.acquireSharedInterruptibly(1); } // 阻塞当前线程,除非count变为0或者等待了timeout的时间。当count变为0时,返回true public boolean await(long timeout, TimeUnit unit) throws InterruptedException { return sync.tryAcquireSharedNanos(1, unit.toNanos(timeout)); } // count递减 public void countDown() { sync.releaseShared(1); } // 获取当前count值 public long getCount() { return sync.getCount(); } public String toString() { return super.toString() + "[Count = " + sync.getCount() + "]"; } }
参考资料:
http://ifeve.com/java-special-troops-aqs/


